Ходьба человека (анатомическая характеристика). Биомеханика ходьбы и бега
Читайте также
Ходьба - это сложное, локомоторное, симметричное, цикличное движение, связанное с отталкиванием тела от опорной поверхности и перемещением его в пространстве. При ходьбе тело никогда не теряет связи с опорной поверхностью. Опора происходит то на одну ногу (одноопорный период), то на обе ноги (двуопорный период). Циклом движений при ходьбе является двойной шаг, который состоит из двух одиночных шагов - одного, произведенного одной ногой, и другого, произведенного другой ногой.
Каждый одиночный шаг, в свою очередь, состоит из двух простых шагов - заднего и переднего. Задний шаг - это та часть одиночного шага, при которой нога находится сзади фронтальной плоскости, проходящей через туловище, а передний шаг - это та часть, при которой нога находится впереди фронтальной плоскости. Границей между задним и передним шагом является момент вертикали.
Если из положения "стойка ноги имеете" вынести вперед левую ногу, будет сделан простой передний шаг, при этом левая нога будет находиться спереди туловища, а правая сзади (двухопорный период). Если затем правую ногу поставить впереди левой, будет сделан одиночный шаг, в котором можно выделить двухопорный период, задний шаг, период вертикали и передний шаг. Два таких одиночных шага(один, сделанный левой другой - правой ногой) и составляют двойной шаг. Таким образом, двойной шаг состоит из двух одиночных или четырех простых шагов. Но поскольку во время ходьбы происходит "наложение" одного шага на другой (заднего на передний), то по пройденному расстоянию двойной шаг состоит из трех простых шагов.
Двойной шаг - сложное движение, поэтому для удобства анализа его целесообразно разделить на отдельные фазы, - менее сложные движения. Двойной шаг состоит из шести фаз, три из них относятся к опорной ноге, три - к свободной:
* (Хотя момент вертикали очень кратковременный, по важности и особенности работы двигательного аппарата его относят условно к фазам. )
Эти шесть фаз двойного шага относятся к одной какой-либо ноге, так как каждая нога в цикле движений при ходьбе (двойном шаге) бывает то опорной, то свободной, повторяя последовательно аналогичные движения (рис. 73).

Ходьба, как и любое другое движение, происходит в результате взаимодействия внешних и внутренних сил. Взаимодействие силы тяжести и силы реакции опоры различно в этом движении в зависимости от его фаз. Сила тяжести действует на протяжении всего цикла движения, а сила реакции опоры - лишь в фазе опорной ноги. В первой фазе - фазе переднего шага опорной ноги, когда тело соприкасается пяткой с опорной поверхностью, - действие силы тяжести направлено вниз-вперед, а силы реакции опоры - вверх-назад. Силу реакции опоры можно разложить на вертикальную и горизонтальную составляющие.
Вертикальная составляющая направлена вверх и противодействует силе тяжести. Если эта составляющая больше силы тяжести, то тело испытывает толчок, направленный вверх, если меньше, то тело, а следовательно и о.ц.т. тела, опускается. Уменьшение толчков, плавность движений при ходьбе достигается использованием амортизационных свойств нижней конечности (приземление на несколько согнутую ногу), мышц-антагонистов и силы инерции.
Горизонтальная составляющая силы реакции опоры в первой фазе опорной ноги направлена назад и несколько уменьшает скорость движения тела. В фазе заднего шага опорной ноги она направлена вперед и способствует увеличению скорости движения, достигая максимума при толчке. Сила реакции опоры передается на о, ц. т. тела, который испытывает колебания в трех плоскостях: вверх-вниз, в стороны и вперед. Наиболее высокое положение о.ц.т. тела занимает в момент вертикали опорной ноги, наиболее низкое - в период двойной опоры. Вертикальные колебания о.ц.т. тела при ходьбе могут достигать 4-6 см, причем чем больше выпрямлена опорная нога, тем колебания о.ц.т. тела больше.
Поскольку стопы при ходьбе несколько развернуты кнаружи, сила реакции опоры направлена не строго в передне-заднем направлении и о. ц. т. тела с переносом тяжести тела на опорную ногу перемещается то вправо, то влево. При выносе ноги вперед (в 1-ю фазу опорной ноги) о. ц. т. тела несколько смещается вперед. Скорость движения о. ц. т. тела при ходьбе неодинакова: в фазе переднего шага опорной ноги она несколько уменьшается, а в фазе заднего шага увеличивается.
Площадь опоры при ходьбе изменяется. В период одиночной опоры она наименьшая и соответствует площади одной стопы, в двухопорный период - наибольшая и представлена площадью опорных поверхностей стоп и площадью пространства между ними.
Опорная поверхность при ходьбе должна обладать определенной плотностью и шероховатостью. Так, ходьба по рыхлому снегу затруднена из-за невысокой плотности, а ходьба по льду - из-за незначительного трения. Тело при ходьбе находится в состоянии неустойчивого равновесия. Степень устойчивости в зависимости от величины площади опоры и высоты расположения о. ц. т. тела различна. В период одинарной опоры она невелика (площадь опоры меньше, и о. ц. т. тела расположен выше), в период двойной опоры значительно больше (о. ц. т. тела ниже, и площадь опоры больше).
Различия в направлении, величине и взаимодействии внешних сил в отдельные фазы ходьбы обусловливают и неодинаковое функционирование опорно-двигательного аппарата. Следует заметить, что при ходьбе в работе участвуют почти все мышцы тела человека, но больше других - мышцы нижних конечностей. Для установления особенностей работы двигательного аппарата при ходьбе проводят анализ одного цикла. Вначале рассматривается работа органов движения: нижних конечностей, затем туловища и, наконец, верхних конечностей.
Работа мышц опорной ноги. Во всех фазах опорного периода нижняя конечность выполняет функции амортизатора, опоры всего тела и обеспечивает отталкивание. Соответственно последовательность включения мышц и их напряжение будут различными в отдельные фазы этого периода. В первую фазу, когда необходимо обеспечить амортизацию и фиксацию звеньев нижней конечности, наиболее напряженными оказываются мышцы передней поверхности голени (разгибатели стопы и пальцев), которые выполняют уступающую работу, способствуя плавному опусканию стопы, и малоберцовые мышцы, которые вместе с передней большеберцовой мышцей увеличивают поперечный свод стопы. Несколько согнутое положение ноги в коленном суставе удерживается сокращением мышц задней поверхности бедра, а в тазобедренном суставе - мышц передней поверхности бедра (четыреглавой мышцы бедра, портняжной и других мышц, осуществляющих сгибание бедра). Однако напряжение последних невелико. К концу первой фазы усиливается напряжение задней группы мышц голени, мышц передней поверхности бедра и мышц, окружающих тазобедренный сустав (рис. 74).

В момент вертикали особенность работы мышц состоит в том, что кроме мышц, фиксирующих голено-стопный, коленный и тазобедренный суставы, напрягаются мышцы, отводящие бедро, которые, работая при дистальной опоре, препятствуют наклону таза в сторону свободной ноги (вокруг передне-задней оси). В фазе заднего шага опорной ноги в наибольшей мере напрягаются мышцы- сгибатели стопы (мышцы задней поверхности голени), разгибатели голени (в основном бедренные головки четырехглавой мышцы бедра) и разгибатели бедра (главным образом большая ягодичная мышца).
Работа мышц свободной ноги. После толчка свободная нога переносится вперед в согнутом положении для уменьшения момента инерции. Поэтому в четвертой фазе - заднем шаге свободной ноги - сокращаются мышцы-сгибатели в коленном суставе (в основном мышцы задней поверхности бедра). В пятой фазе - момент вертикали свободной ноги - происходит сокращение мышц-разгибателей стопы, уменьшающих возможность соприкосновения ее с опорной поверхностью, и сгибателей бедра, способствующих переносу ноги вперед. В шестой фазе к указанным мышцам присоединяется четырехглавая мышца бедра. Ее специфическая так называемая "баллистическая" работа - быстрое сокращение мышцы, сменяющееся столь же быстрым их расслаблением, - обусловливает движение голени вперед по инерции.
Работа мышц туловища. Во время ходьбы движения туловища происходят вокруг трех осей вращения - поперечной, передне-задней и вертикальной. Этим объясняется своеобразие в напряжении отдельных групп мышц. В первой фазе опорной ноги (передний шаг) туловище под влиянием действующих сил несколько наклоняется вперед. Для удержания его напрягаются мышцы задней поверхности туловища (разгибатели). В фазе заднего шага опорной ноги для предотвращения падения тела назад напрягаются мышцы передней поверхности туловища (сгибатели), преимущественно мышцы живота. Они напряжены и в первой фазе свободной ноги. Сокращаясь при верхней опоре, они фиксируют таз и создают опору для выноса вперед маховой ноги.
В момент вертикали опорной ноги происходят наклоны туловища в сторону. При этом мышцы туловища, сокращаясь, закрепляют его к нижней конечности, а напряжение мышцы, выпрямляющей позвоночник, на противоположной стороне (на стороне свободной ноги) препятствует опусканию таза и уменьшает наклон туловища в сторону опорной ноги.
В наибольшей мере выражены повороты туловища - скручивание. При выносе вперед свободной ноги (передний шаг) туловище вместе с тазом поворачивается вокруг вертикальной оси в сторону опорной ноги. При этом напрягаются внутренняя косая мышца живота с той стороны, в которую поворачивается туловище, а также наружная косая мышца живота, поперечно-остистая (особенно подвздошно-реберная), подвздошно-поясничная и другие - с противоположной стороны.
Голова при ходьбе держится прямо. Этому способствуют мышцы, расположенные в верхнем отделе задней поверхности туловища (трапециевидная, пластырная и др.).
Работа мышц верхних конечностей. Большое значение при ходьбе имеет согласованное движение верхних и нижних конечностей, так называемая "перекрестная координация", при которой вынос вперед правой ноги сочетается с выносом вперед левой руки, и наоборот. Перекрестная координация уменьшает вращательные движения туловища. Движения рук при обычной ходьбе не требуют больших усилий. Движение руки вперед происходит благодаря напряжению мышц, расположенных спереди плечевого сустава (большой грудной, передней части дельтовидной мышцы и клювовидно-плечевой), движение назад обусловлено мышцами, находящимися на задней поверхности плечевого сустава, - задней частью дельтовидной мышцы, широчайшей мышцей спины и длинной головкой трехглавой мышцы плеча. Для этих движений может быть достаточно поочередного сокращения передней и задней частей дельтовидной мышцы. Небольшие сгибания и разгибания в локтевом суставе происходят при сокращении двуглавой мышцы плеча и плечевой мышцы (движение вперед), а также трехглавой мышцы плеча (движение назад).
Работа мышц верхних и нижних конечностей при ходьбе носит преимущественно динамический характер, наибольшая нагрузка падает на мощные мышечные группы. Чередование фаз напряжения и расслабления мышц длительное время не вызывает утомления.
Ходьба - прекрасное средство для развития двигательного аппарата, поскольку частоту и длину шагов, а также темп ходьбы легко регулировать. Она оказывает влияние почти на все мышцы человека и на все системы органов.
Источник: http://www.medicinform.net/revmo/ther_pop34.htm , автор, если я правильно понимаю — Угнивенко. Почему он боится подписаться — не знаю.Стопа — это орган опорно-двигательной системы, состоящий из 26 костей, 33 суставов, сети из более 100 связок, сухожилий и мышц, покрытый кожей, которая со стороны подошвы имеет уникальное строение, которое позволяет ей переносить сжимающие нагрузки большой величины (до 200 кг на см2).
Стопа является сложным биомеханическим комплексом, выполняющим 3 важные задачи при обеспечении функции опоры и движения человека:
1) обеспечение опоры и равновесия при стоянии,
2) поглощение энергии удара в момент "приземления" и придание телу вертикального импульса в момент отталкивания от опоры, что необходимо для реализации естественных локомоций (ходьба, бег, прыжки),
3) защита опорно-двигательной системы от возможных травм и перегрузок.
(Я обожаю милую привычку русских людей пиздить картинки и материалы без указания источника. Откуда она взята, я не знаю, встречаю её раз в 3 или 4 в разных местах, конкретно эту взял здесь, кто автор статьи и художник — неизвестно http://www.ploscostopie.ru/specialists/chil_ortoped/stopa_i_osanka1/ — H.B.)
Стопа — это важная составная часть опорно-двигательной системы. Её функция и структура с одной стороны зависит от вышележащих элементов опорно-двигательного аппарата, а с другой стороны оказывает на них положительное или негативное влияние. Функция и структура стопы зависит от особенностей системы управления стоянием и локомоциями (от двигательного стереотипа) и от условий эксплуатации (особенности обуви, особенность и интенсивность повседневной двигательной активности).
Основное движение в стопе пронация — супинация...
Динамика стопы — это взаимодействие сил, действующих на стопу, и тех нагрузок и напряжений, которые возникают при воздействии этих сил. Стопа — это составная часть биомеханической системы опорно-двигательного аппарата и её динамика не может быть рассмотрена вне связи с этой системой. Динамика стопы это производная от движений опорно-двигательной системы (кинематики). Наиболее типовые движения человека, связанные с нагрузкой стопы — ходьба.
Стопа преодолевает очень большие по величине и по продолжительности повторяющиеся нагрузки. Скорость, на которой стопа "приземляется" на опору, составляет при быстрой ходьбе составляет 5 метров в секунду (18 км в час), а при беге до 20 м. в сек (70 км в час), что определяет силу столкновения с опорой равную 120-250% от веса тела. В течение дня обычный человек совершает от 2 до 6 тысяч шагов (за год — 860 000 — 2 085 600 шагов). Даже современные приборы - протезы стопы не служат при такой эксплуатации более 3 лет. Долговечность стопы человека определяется во первых совершенством механической конструкции и во вторых — уникальность материала, из которого "сделана" стопа.

Наиболее общие параметры, характеризующие ходьбу . Такими параметрами являются линия перемещения центра масс тела, длина шага, длинна двойного шага, угол разворота стопы, база опоры, а так же скорость перемещения и ритмичность ходьбы.
База опоры — это расстояние между двумя параллельными линиями, проведенными через центры опоры пяток параллельно линии перемещения. База опоры определяет устойчивость тела человека.
Разворот стопы — это угол, образованный линией перемещения и линией, проходящей через середину стопы: через центр опоры пятки и точку между 1 и 2 пальцем. Чем больше разворот стопы, тем больше база опоры, но меньше эффективность ходьбы (и наоборот).
Короткий шаг — это расстояние между точкой опоры пятки одной ноги и центром опоры пятки противоположной ноги.
Ритмичность — число шагов в минуту. Для взрослого – 113 шагов в минуту.
Ритмичность — отношение длительности переносной фазы одной ноги к длительности переносной фазы другой ноги.
Скорость ходьбы — число больших шагов в единицу времени, измеряется в единицах: шаг в минуту или километр в час.

Рисунок. Методика подографии.
Методики исследования ходьбы
Кинематику ходьбы изучают с использованием контактных и бесконтактных датчиков измерения углов в суставах (гониометрия), а так же с применением гироскопов — приборов, позволяющих определить угол наклона сегмента тела относительно линии гравитации. Важным методом в исследовании кинематики ходьбы является методика циклографии — метод регистрации координат светящихся точек, расположенных на сегментах тела.
Динамические характеристики ходьбы изучают с применением динамографической (силовой) платформы. При опоре на силовую платформу регистрируют вертикальную реакцию опоры, а также горизонтальные её составляющие.
Для регистрации давления отдельных участков стопы применяют датчики давления или тензодатчики, вмонтированные в подошву обуви.
Физиологические параметры ходьбы регистрируют при помощи методики электромиографии – методики регистрации биопотенциалов мышц. Электромиография, сопоставленная с данными методик оценки временной характеристики, кинематики и динамики ходьбы, является основой биомеханического и иннервационного анализа ходьбы.
Подография позволяет регистрировать моменты контакта различных отделов стопы с опорой для оценки временной структуры ходьбы. На этом основании определяют временные фазы шага.
Рассмотрим пример исследования ходьбы, основанного на применении самой простой, двухконтактной электроподографии. Этот метод заключается в использовании контактов в подошве специальной обуви, которые замыкаются при опоре на биомеханическую дорожку. На рисунке изображена ходьба в специальной обуви с двумя контактами в области пятки и переднего отдела стопы. Период замыкания контакта регистрируется и анализируется прибором: замыкание заднего контакта — опора на пятку, замыкание заднего и переднего — опора на всю стопу, замыкание переднего контакта — опора на передний отдел стопы. На этом основании строят график длительности каждого контакта для каждой ноги.

Рисунок. Временная структура ходьбы.
Существуют различные схемы временной структуры шага, предложенные различными биомеханическими школами. (Класс! Прямо "в военное время косинус 45 может достигать единицы". Только ссылки давать надо — H.B.)
График самой простой двухконтактной подограммы изображается в виде двух схем: подограмма правой ноги и подограмма левой ноги. Красным цветом выделена подограмма правой ноги. То есть той ноги, которая в данном случае начинает и заканчивает цикл ходьбы — двойной шаг. Тонкой линией обозначают отсутствие контакта с опорой, затем мы видим время контакта на задний отдел стопы, на всю стопу и на передний отдел.
Локомоторный цикл состоит из двух двуопорных и двух переносных фаз. По подограмме определяют интервал опоры на пятку, на всю стопу и на её передний отдел. Временные характеристики шага выражают в секундах и в процентах к продолжительности двойного шага, длительность которого принимают за 100%. Все остальные параметры ходьбы (кинематические, динамические и электрофизиологические) привязывают к подограмме — основному методу оценки временной характеристики ходьбы.
При ходьбе человек последовательно опирается то на одну, то на другую ногу. Эта нога называется опорной.
Контралатеральная (противоположная) нога в этот момент выносится вперёд (Это - переносная нога).
Период переноса ноги называется «фаза переноса ".
Полный цикл ходьбы - период двойного шага — слагается для каждой ноги из фазы опоры и фазы переноса конечности.
В опорный период активное мышечное усилие конечностей создаёт динамические толчки, сообщающие центру тяжести тела ускорение, необходимое для поступательного движения. При ходьбе в среднем темпе фаза опоры длится примерно 60% от цикла двойного шага, фаза опоры примерно 40%.
Рассмотрим наиболее общие перемещения тела в сагиттальной плоскости в процессе двойного шага. Началом двойного шага принято считать момент контакта пятки с опорой. В норме приземление пятки осуществляется на её наружный отдел (Ссылка где? Откуда взята норма? — H.B.) . С этого момента эта (правая) нога считается опорной. Иначе эту фазу ходьбы называют передний толчок — результат взаимодействия силы тяжести движущегося человека с опорой. На плоскости опоры при этом возникает опорная реакция, вертикальная составляющая корой превышает массу тела человека.

Рисунок. Сила реакции опоры.
Реакция опоры
Реальные силы при ходьбе, которые можно измерить — это силы реакции опоры. Сопоставление силы реакции опоры и кинематики шага позволяютувеличить оценить величину вращающего момента сустава.
Сила реакции опоры — это сила, действующая на тело со стороны опоры. Эта сила равна и противоположна той силе, которую оказывает тело на опору. Если при стоянии сила реакции опоры равна весу тела, то при ходьбе к этой силе прибавляются сила инерции и сила, создаваемая мышцами при отталкивании от опоры.
Для исследования силы реакции опоры обычно применяют динамографическую (силовую) платформу, которая вмонтирована в биомеханическую дорожку. При опоре в процессе ходьбы на эту платформу регистрируют возникающие силы — силы реакции опоры. Силовая платформа позволяет регистрировать результирующий вектор силы реакции опоры.
Динамическая характеристика ходьбы оценивается путём исследования опорных реакций
, которые отражают взаимодействие сил
, принимающих участие в построении локомоторного акта:
— мышечных,
— гравитационных и
— инерционных.
Вектор опорной реакции
в проекции на основные плоскости разлагается на три составляющие:
— вертикальную,
— продольную и
— поперечную.
Эти составляющие позволяют судить об усилиях, связанных с вертикальным, продольным и поперечным перемещением общего центра масс.
Сила реакции опоры
включает в себя
— вертикальную составляющую, действующую в направлении вверх-вниз,
— продольную составляющую, направленную вперед-назад по оси Y, и
— поперечную составляющую, направленную медиально-латерально по оси X.
Это производная от силы мышц, силы гравитации и силы инерции тела.

Рисунок. Вертикальная составляющая опорной реакции.
Вертикальная составляющая вектора опорной реакции.
График вертикальной составляющей опорной реакции при ходьбе в норме имеет вид плавной симметричной двугорбой кривой. Первый максимум кривой соответствует интервалу времени, когда в результате переноса тяжести тела на опорную ногу происходит передний толчок, второй максимум (задний толчок) отражает активное отталкивание ноги от опорной поверхности и вызывает продвижение тела вверх, вперёд и в сторону опорной конечности.
Оба максимума расположены выше уровня веса тела и составляют соответственно при медленном темпе примерно 100% от веса тела, при произвольном темпе 120%, при быстром — 150% и 140%. (Ссылки! Откуда эти данные опять? С потолка? — H.B.)
Минимум опорной реакции расположен симметрично между ними ниже линии веса тела. Возникновение минимума обусловлено задним толчком другой ноги и последующим её переносом; при этом появляется сила, направленная вверх, которая вычитается из веса тела. Минимум опорной реакции при разных темпах составляет от веса тела соответственно: при медленном темпе — примерно 100%, при произвольном темпе 70%, при быстром — 40%.

Рисунок. Точка приложения вектора реакции опоры.
Точка приложения вектора реакции опоры на стопу иначе называется центром давления. Это важно, для того чтобы знать, где находится точка приложения сил, действующих на тело со стороны опоры. При исследовании на силовой платформе эта точка называется точкой приложения силы реакции опоры .
Траектория силы реакции опоры в процессе ходьбы изображается в виде графика: «зависимость величины силы реакции опоры от времени опорного периода». График представляет собой перемещение вектора реакции опоры под стопой. Нормальный паттерн, траектория перемещения реакции опоры при нормальной ходьбе представляет собой перемещение от наружного отдела пяти вдоль наружного края стопы в медиальном направлении к точке между 1 и 2 пальцем стопы.
Траектория перемещения вариабельна и зависит от темпа и типа ходьбы, от рельефа поверхности опоры, от типа обуви, а именно от высоты каблука и от жёсткости подошвы. Паттерн реакции опоры во многом определяется функциональным состоянием мышц нижней конечности и иннервационной структурой ходьбы.
Важную информацию о распределении давления на различные участки стопы получают при помощи тензометрических измерений. Тензодатчики — датчики давления — располагают в специальной стельке для обуви. Этот метод исследования позволяет изучить не результирующую силу реакции опоры, как при динамометрическом методе, а распределение давления под разными отделами стопы.
Особенности биомеханики стопы при ходьбе
 Рисунок. Фазы опорной реакции.
Рисунок. Фазы опорной реакции.
При ходьбе стопа выполняет четыре основные функции:
— адаптация к неровностям поверхности,
— поглощение энергии удара при приземлении,
— функцию жёсткого рычага для передачи вращательного момента вышележащим сегментам,
— перераспределение и смягчение ротационных усилий вышележащих сегментов.
Биомеханика стопы и функции стопы в различные фазы шага — различны. Если в фазу амортизации основная задача стопы — смягчение удара при контакте с поверхностью, то в период опоры на всю стопу задача стопы — перераспределение энергии для эффективного выполнения следующей фазы — отталкивания от опоры . Эта фаза ставит перед стопой задачу передачи лежащим выше сегментам силы реакции опоры.
Смягчение инерционной нагрузки при ходьбе и беге осуществляется сложным комплексом суставно-связочного аппарата, соединяющего 26 основных костей стопы, в котором выделяют 3 продольных и поперечный свод .
Рассмотрим строение только одного из них — среднего продольного свода . Пяточная, таранная и кости плюсны и предплюсны образуют своеобразную арку — рессору, способную уплощаться и расправляться. Нагрузка — вес тела — распределяется равномерно на передний и задний отдел стопы. Передний и задний отделы стопы соединены в единую кинематическую цепь мощным эластичным сухожилием — подошвенным апоневрозом, который подобно пружине возвращает распластанный под нагрузкой свод стопы (см. статью "стопа в статике").
 Рисунок. Супинация и пронация стопы.
Рисунок. Супинация и пронация стопы.
Рассмотрим точки приложения реакции опоры к стопе в процессе фазы опоры. Стопа приземляется на наружный отдел пятки. Затем на протяжении фазы приземления центр силы реакции опоры смещается к центру стопы в фазе опоры на всю стопу и на её передний внутренний отдел в фазу отталкивания.
Биомеханический смысл такой траектории перемещения точки приложения силы реакции опоры заключается в том, что при этом в различные фазы опоры создаются вращающие моменты , которые вызывают следующие движения в суставах стопы:
— супинация стопы — варус пятки
и переднего отделов (рисунок 1); (Полая стопа, косолапие — H.B.)
— пронация стопы — вальгус переднего отдела и пятки
, распластывание стопы (рисунок 2); (Плоскостопие — H.B.)
— вновь пронация стопы, при которой суставы стопы замыкаются и стопа приобретает жёсткость, необходимую для передачи энергии верхним сегментам (рисунок 3).
При опоре на всю стопу суставы размыкаются, стопа легко адаптируется к поверхности опоры. В этот период сухожилие стопы запасает энергию в виде энергии упругих связей, которую затем возвращает в период отталкивания.
Пронация стопы — результат внутренней ротации бедра в первую половину опоры ноги. При опоре на пятку колено подгибается, бедро ротируется внутрь, это ускоряет перекат через пятку и перенос веса тела на всю стопу. Затем стопа неизбежно распластывается, и энергия движения переходит в энергию упругих связей стопы.
Таким образом, во время ходьбы мы можем наблюдать два паттерна движений в суставах стопы: супинация и пронация.
При супинации стопа вращается внутрь за счёт подтаранного сустава, пятка находится в положении варуса, свод высокий . Суставы стопы находятся в положении замыкания, что обеспечивает необходимую жёсткость стопы при приземлении и отталкивании.
При пронации стопы мы видим обратный паттерн: продольный свод опускается, пятка в подтаранном суставе принимает положение вальгуса, суставы размыкаются, стопа легко адаптируется к опоре.
Отметим, что продольный свод стопы активно удерживает передняя большеберцовая мышца, дополнительно смягчает инерцию приземления и возвращает жёсткость стопы при отталкивании. В момент пронации стопа создает вращательный момент голени — момент наружной ротации.
 Рисунок 20. Движение в подтаранном суставе.
Рисунок 20. Движение в подтаранном суставе.
Движение — пронация стопы — это вращение в подтаранном суставе
Ось этого сустава расположена косо, таким образом, что пронация стопы приводит к ротации голени. Это важно для рассмотрения вопроса "особенности биомеханики коленного сустава при ходьбе". Ось подтаранного сустава расположена косо в направлении спереди назад, изнутри кнаружи. Она явно не совпадает с направлением оси голеностопного и коленного суставов. Однако, именно такое её положение (явно несоосное с другими суставами) определяет эффективность ходьбы.
 Рисунок. Распределение нагрузки в период опоры на стопу при ходьбе.
Рисунок. Распределение нагрузки в период опоры на стопу при ходьбе.
На рисунке мы видим, что первый пик нагрузки получается из контакта наружного отдела пятки с опорой, этот пик находится в первой фазе, в фазе переднего толчка. По мере переката через пятку нагрузка перемещается более на медиальный отдел пятки. Затем, нагрузка перемещается последовательно на 5, 4, 3 и затем вторую плюсневую кость. Это характерно для фазы опоры на всю стопу.
И в фазе отталкивания, в фазе опоры на передний отдел, нагрузка перемещается на первую плюсневую кость и большой палец ноги. Подгибание первого пальца и отталкивание от опоры завершает опорную фазу шага. Стопа отрывается от опоры.
Как мы уже говорили, результирующая, полученная при сложении всех сил, которые формируются при приземлении, опоре и отталкивании, выглядит в виде двугорбой кривой. Здесь следует отметить, что силы, определяющие реакцию опоры, имеют различное направление. Если при приземлении, силы гравитации и инерции направлены вниз, то при отталкивании сила активного сокращения мышц и инерции тела — вверх. При приземлении ноги мышцы работают в уступающем режиме и гасят энергию удара. Для реализации этого механизма необходима трансформация поступательного движения во вращательное . Один из таких механизмов мы рассмотрели выше: опора на пятку приводит к вращению относительно подтаранного сустава, пронация стопы приводит к наружной ротации голени и таким образом энергия приземления передается к вышележащим сегментам. Однако, этого недостаточно для полноценного поглощения переднего толчка.
 Рисунок. Модель обратного маятника.
Рисунок. Модель обратного маятника.
Рассмотрим ещё один важный биомеханический механизм — вращение относительно голеностопного сустава. Для этого представим себе идущего человека в виде обратного маятника с центром вращения в голеностопном суставе. Мы видим, как при опоре на пятку возникает вращающий момент, голень под влиянием силы инерции наклоняется вперёд, возникает целый каскад вращения в вышележащих суставах ноги, и общий центр масс тела совершает поступательное движение вперед. Схема, представленная на рисунке, не совсем точна, на ней (для упрощения) не изображён очень важный момент, очень важный механизм — подгибание в коленном суставе в момент опоры на пятку. Этот и многие другие механизмы трансформации движений при ходьбе, мы возможно рассмотрим в других статьях, посвященных биомеханике ходьбы.
 Рисунок. Уступающая и преодолевающая работа мышц при ходьбе.
Рисунок. Уступающая и преодолевающая работа мышц при ходьбе.
Для того, чтобы получить общее представление о работе мышц при ходьбе, которые являются не только источником энергии поступательного движения, но и выполняют важную функцию поглощения и перераспределения энергии в первую фазу опоры посмотрите на рисунок. Мышцы нижней конечности работают то в уступающем, то в преодолевающем режиме, то есть то притормаживают, то ускоряют движения в суставах, обеспечивая плавное поступательное движение общего центра массы.
Стопа является первым самым нагружаемым звеном этой сложной трансмиссии. Она осуществляет контакт с опорой, она перераспределяет силу реакции опоры на вышележащие сегменты опорно-двигательного аппарата и выполняет важную рессорную функцию, она обеспечивает устойчивость ноги и сцепление с опорной поверхностью.
Способность стопы противостоять нагрузкам обусловлена не только биомеханическим совершенством, но и свойством составляющих её тканей. Короткие и прочные кости стопы имеют форму, точно соответствующую направлению и величине нагрузки.
Известный закон биологии гласит «Функция определяет форму», из этого вытекают прошедшие проверку временем и практикой постулаты: "механические напряжения полностью определяют все детали структуры" и "кость разрастается преимущественно по направлению тяги и перпендикулярно плоскости давления". Структура нагрузки повседневных движений влияет и на рост детского скелета (например, быстрее растёт более нагружаемая толчковая, обычно правая, нога), и на структуру скелета у взрослых. Внешняя форма костей может изменяться под влиянием различных видов спорта или профессиональных движений. Они становятся массивнее и толще за счёт увеличения костной массы в наиболее нагружаемых участках. Таким образом, кости стопы адаптируют свою прочность в соответствии с весом человека и с повседневной двигательной активностью.
 Рисунок. Подошвенный апоневроз и пяточная шпора.
Рисунок. Подошвенный апоневроз и пяточная шпора.
Аналогичный закон действует и в отношении соединительнотканных структур стопы (связок, сухожилий и фасций). Волокна самой мощной фасции стопы — подошвенного апоневроза ориентированы вдоль самого нагружаемого продольного свода стопы (рис.).
Если повторяющиеся нагрузки по своей величине или продолжительности превышают возможности тканей стопы, то в них развиваются патологические реакции перегрузки и патологические процессы, такие как воспаление сухожилия, усталостные переломы, разрывы сухожилий... Например, отложение солей кальция в области прикрепления подошвенного апоневроза к бугру пяточной кости, которое именуется пяточной шпорой.
Плоскостопие, гиподинамия, избыточные спортивные нагрузки — обычная причина этих заболеваний. Но об этом в другой статье. (Ссылочки не забудьте — H.B.)
http://www.ploscostopie.ru/specialists/chil_ortoped/stopa_i_osanka1/ Автор статьи неизвестен, источник картинок — тоже. Но картинку с ротацией я вижу раз в 3 или 4.Стопа и осанка
Какая связь между этими, казалось бы, отдалёнными частями тела: стопой и позвоночником? Прямая!Наше тело от стоп до макушки — это отточенная эволюцией конструкция, где все звенья взаимосвязаны.
Стопы — «фундамент» тела, изъяны фундамента неизбежно вызывают перекос всей конструкции, нарушают осанку и походку человека, приводя к болям в позвоночнике и преждевременному «износу» суставов. По данным литературы, не менее чем у 80 % населения возникают проблемы опорно-двигательного аппарата, напрямую или опосредованно связанные с деформациями стопы.
Начальные элементы деформаций и функциональные недостатки стоп и осанки закладываются в детстве и следуют за человеком в его взрослую жизнь.

Считается, что с первых шагов ребёнка и до старости человек пешком огибает землю 4 раза. Стопа — это комплексная структура, состоящая из 26 костей, соединённых связками, суставами, мышцами и сухожилиями.
При рождении стопы детей ещё не сформированы, а будущие костные структуры представлены хрящом. Своды стоп, как и изгибы позвоночного столба, начинают активно формироваться с началом прямохождения. Первый этап формирования сводов стопы и осанки завершается к 8-9 годам, когда очертания стопы и спины ребёнка начинают быть похожими на формы взрослого человека. В период гормонального созревания происходит дальнейшая перестройка, направленная на функциональное совершенствование структур стопы и осанки.
Рисунок. Компенсаторный сколиоз в результате вальгусного отклонения стопы
Рисунок. Восходящая цепь перегрузок и повреждения при плоско-вальгусных стопах
Динамика стопы - это взаимодействие сил, действующих на стопу, и тех нагрузок и напряжений, которые возникают при воздействии этих сил. Стопа - это составная часть биомеханической системы опорно-двигательного аппарата и ее динамика не может быть рассмотрена вне связи с этой системой. Динамика стопы это производная от движений опорно-двигательной системы (кинематики). Наиболее типовые движения человека, связанные с нагрузкой стопы - ходьба.
Стопа преодолевает очень большие по величине и по продолжительности повторяющиеся нагрузки. Скорость, на которой стопа "приземляется" на опору, составляет при быстрой ходьбе составляет 5 метров в секунду (18 км в час), а при беге до 20 м. в сек (70 км в час), что определяет силу столкновения с опорой равную 120-250% от веса тела. В течение дня обычный человек совершает от 2 до 6 тысяч шагов (за год - 860 000 - 2 085 600 шагов). Даже современные приборы - протезы стопы не служат при такой эксплуатации более 3 лет. Долговечность стопы человека определяется во первых совершенством механической конструкции и во вторых - уникальность материала, из которого "сделана" стопа.
Рисунок 12. Общие параметры, характеризующие ходьбу.
Наиболее общие параметры, характеризующие ходьбу (рис 12). Такими параметрами являются линия перемещения центра масс тела, длина шага, длинна двойного шага, угол разворота стопы, база опоры, а так же скорость перемещения и ритмичность ходьбы. База опоры – это расстояние между двумя параллельными линиями, проведенными через центры опоры пяток параллельно линии перемещения. База опоры определяет устойчивость тела человека. Разворот стопы – это угол, образованный линией перемещения и линией, проходящей через середину стопы: через центр опоры пятки и точку между 1 и 2 пальцем. Чем больше разворот стопы, тем больше база опоры, но меньше эффективность ходьбы (и наоборот). Короткий шаг – это расстояние между точкой опоры пятки одной ноги и центром опоры пятки противоположной ноги. Ритмичность – число шагов в минуту. Для взрослого – 113 шагов в минуту. Ритмичность – отношение длительности переносной фазы одной ноги к длительности переносной фазы другой ноги. Скорость ходьбы – число больших шагов в единицу времени, измеряется в единицах: шаг в минуту или километр в час.

Рисунок 13. Методика подографии.
Методики исследования ходьбы. Кинематику ходьбы изучают с использованием контактных и бесконтактных датчиков измерения углов в суставах (гониометрия), а так же с применением гироскопов – приборов, позволяющих определить угол наклона сегмента тела относительно линии гравитации. Важным методом в исследовании кинематики ходьбы является методика циклографии – метод регистрации координат светящихся точек, расположенных на сегментах тела.
Динамические характеристики ходьбы изучают с применением динамографической (силовой) платформы. При опоре силовую платформу регистрируют вертикальную реакцию опоры, а также горизонтальные ее составляющие. Для регистрации давления отдельных участков стопы применяют датчики давления или тензодатчики, вмонтированные в подошву обуви. Физиологические параметры ходьбы регистрируют при помощи методики электромиографии – методики регистрации биопотенциалов мышц. Электромиография, сопоставленная с данными методик оценки временной характеристики, кинематики и динамики ходьбы, является основой биомеханического и инервационного анализа ходьбы.
Подография позволяет регистрировать моменты контакта различных отделов стопы с опорой для оценки временной структуры ходьбы. На этом основании определяют временные фазы шага. Рассмотрим пример исследования ходьбы, основанного на применении самой простой, двухконтактной электроподографии. Этот метод заключается в использовании контактов в подошве специальной обуви, которые замыкаются при опоре на биомеханическую дорожку. На рисунке изображена ходьба в специальной обуви с двумя контактами в области пятки и переднего отдела стопы. Период замыкания контакта регистрируется и анализируется прибором: замыкание заднего контакта – опора на пятку, замыкание заднего и переднего – опора на всю стопу, замыкание переднего контакта – опора на передний отдел стопы. На этом основании строят график длительности каждого контакта для каждой ноги.

Рисунок 14. Временная структура ходьбы.
Существуют различные схемы временной структуры шага, предложенные различными биомеханическими школами. График самой простой двухконтактной подограммы изображается в виде двух схем: подограмма правой ноги и подограмма левой ноги. Красным цветом выделена подограмма правой ноги. То есть той ноги, которая в данном случае начинает и заканчивает цикл ходьбы – двойной шаг. Тонкой линией обозначают отсутствие контакта с опорой, затем мы видим время контакта на задний отдел стопы, на всю стопу и на передний отдел. Локомоторный цикл состоит из двух двуопорных и двух переносных фаз. По подограмме определяют интервал опоры на пятку, на всю стопу и на ее передний отдел. Временные характеристики шага выражают в секундах и в процентах к продолжительности двойного шага, длительность которого принимают за 100%. Все остальные параметры ходьбы (кинематические, динамические и электрофизиологические) привязывают к подограмме – основному методу оценки временной характеристики ходьбы.
При ходьбе человек последовательно опирается то на одну, то на другую ногу. Эта нога называется опорной. Контралатеральная (противоположная) нога в этот момент выносится вперед (Это - переносная нога). Период переноса ноги называется «фаза переноса. Полный цикл ходьбы - период двойного шага - слагается для каждой ноги из фазы опоры и фазы переноса конечности. В опорный период активное мышечное усилие конечностей создаёт динамические толчки, сообщающие центру тяжести тела ускорение, необходимое для поступательного движения. При ходьбе в среднем темпе фаза опоры длится примерно 60% от цикла двойного шага, фаза опоры примерно 40%. Рассмотрим наиболее общие перемещения тела в сагиттальной плоскости в процессе двойного шага. Началом двойного шага принято считать момент контакта пятки с опорой. В норме приземление пятки осуществляется на ее наружный отдел. С этого момента эта (правая) нога считается опорной. Иначе эту фазу ходьбы называют передний толчок – результат взаимодействия силы тяжести движущегося человека с опорой. На плоскости опоры при этом возникает опорная реакция, вертикальная составляющая корой превышает массу тела человека.

Рисунок 15. Сила реакции опоры.
Реальные силы при ходьбе, которые можно измерить – это силы реакции опоры. Сопоставление силы реакции опоры и кинематики шага позволяютоценить величину вращающего момента сустава. Сила реакции опоры это сила, действующая на тело со стороны опоры. Эта сила равна и противоположна той силе, которую оказывает тело на опору. Если при стоянии сила реакции опоры равна весу тела, то при ходьбе к этой силе прибавляются сила инерции и сила, создаваемая мышцами при отталкивании от опоры.
Для исследования силы реакции опоры обычно применяют динамографическую (силовую) платформу, которая вмонтирована в биомеханическую дорожку. При опоре в процессе ходьбы на эту платформу регистрируют возникающие силы – силы реакции опоры. Силовая платформа позволяет регистрировать результирующий вектор силы реакции опоры.
Динамическая характеристика ходьбы оценивается путем исследования опорных реакций, которые отражают взаимодействие сил, принимающих участие в построении локомоторного акта: мышечных, гравитационных и инерционных. Вектор опорной реакции в проекции на основные плоскости разлагается на три составляющие: вертикальную, продольную и поперечную. Эти составляющие позволяют судить об усилиях, связанных с вертикальным, продольным и поперечным перемещением общего центра масс.
Сила реакции опоры включает в себя вертикальную составляющую, действующую в направлении вверх-вниз, продольную составляющую, направленную вперед-назад по оси Y, и поперечную составляющую, направленную медиально-латерально по оси X. Это производная от силы мышц, силы гравитации и силы инерции тела.

Рисунок 16. Вертикальная составляющая опорной реакции.
Вертикальная составляющая вектора опорной реакции (рис 16). График вертикальной составляющей опорной реакции при ходьбе в норме имеет вид плавной симметричной двугорбой кривой. Первый максимум кривой соответствует интервалу времени,
когда в результате переноса тяжести тела на опорную ногу происходит передний толчок, второй максимум (задний толчок) отражает активное отталкивание ноги от опорной поверхности и вызывает продвижение тела вверх, вперед и в сторону опорной конечности. Оба максимума расположены выше уровня веса тела и составляют соответственно при медленном темпе примерно 100% от веса тела, при произвольном темпе 120%, при быстром - 150% и 140%.Минимум опорной реакции расположен симметрично между ними ниже линии веса тела. Возникновение минимума обусловлено задним толчком другой ноги и последующим ее переносом; при этом появляется сила, направленная вверх, которая вычитается из веса тела. Минимум опорной реакции при разных темпах составляет от веса тела соответственно: при медленном темпе – примерно 100%, при произвольном темпе 70%, при быстром - 40%.
Таким образом, общая тенденция при увеличении темпа ходьбы состоит в росте значений переднего и заднего толчков и снижении минимума вертикальной составляющей опорной реакции.
Реакция опоры - эти силы приложенные к стопе. Вступая в контакт с поверхностью опоры, стопа испытывает давление со стороны опоры, равное и противоположное тому, которое стопа оказывает на опору. Это и есть реакция опоры стопы. Эти силы неравномерно распределяются по контактной поверхности. Как и все сила такого рода их можно изобразить в виде результирующего вектора, который имеет величину и точку приложения.

Рисунок 17. Точка приложения вектора реакции опоры.
Точка приложения вектора реакции опоры на стопуиначе называется центром давления. Это важно, для того чтобы знать, где находится точка приложения сил, действующих на тело со стороны опоры. При исследовании на силовой платформе эта точка называется точкой приложения силы реакции опоры. Траектория силы реакции опоры в процессе ходьбы изображается в виде графика: «зависимость величины силы реакции опоры от времени опорного периода». График представляет собой перемещение вектора реакции опоры под стопой. Нормальный паттерн, траектория перемещения реакции опоры при нормальной ходьбе представляет собой перемещение от наружного отдела пяти вдоль наружного края стопы в медиальном направлении к точке между 1 и 2 пальцем стопы.
Траектория перемещения вариабельна и зависит от темпа и типа ходьбы, от рельефа поверхности опоры, от типа обуви, а именно от высоты каблука и от жесткости подошвы. Паттерн реакции опоры во многом определяется функциональным состоянием мышц нижней конечности и инервационной структурой ходьбы.
Важную информацию о распределении давления на различные участки стопы получают при помощи тензометрических измерений. Тензодатчики – датчики давления располагают в специальной стельке для обуви. Этот метод исследования позволяет изучить не результирующую силу реакции опоры, как при динамометрическом методе, а распределение давления под разными отделами стопы.
 Особенности биомеханики стопы при ходьбе. При ходьбе стопа выполняет четыре основные функции: адаптация к неровностям поверхности, поглощение энергии удара при приземлении, функцию жесткого рычага для передачи вращательного момента вышележащим сегментам, перераспределение и смягчение ротационных усилий вышележащих сегментов. Рисунок 18. Фазы опорной реакции.Биомеханика стопы и функции стопы в различные фазы шага – различны. Если в фазу амортизации основная задача стопы – смягчение удара при контакте с поверхностью, то в период опоры на всю стопу – задача стопы – перераспределение энергии для эффективного выполнения следующей фазы – отталкивания от опоры. Эта фаза ставит перед стопой задачу передачи лежащим выше сегментам силы реакции опоры. Смягчение инерционной нагрузки при ходьбе и беге осуществляется сложным комплексом суставно-связочного аппарата, соединяющего 26 основных костей стопы, в котором выделяют 3 продольных и поперечный свод. Рассмотрим строение только одного из них – среднего продольного свода. Пяточная, таранная и кости плюсны и предплюсны образуют своеобразную арку - рессору, способную уплощаться и расправляться. Нагрузка – вес тела - распределяется равномерно на передний и задний отдел стопы. Передний и задний отделы стопы соединены в единую кинематическую цепь мощным эластичным сухожилием – подошвенным апоневрозом,
Особенности биомеханики стопы при ходьбе. При ходьбе стопа выполняет четыре основные функции: адаптация к неровностям поверхности, поглощение энергии удара при приземлении, функцию жесткого рычага для передачи вращательного момента вышележащим сегментам, перераспределение и смягчение ротационных усилий вышележащих сегментов. Рисунок 18. Фазы опорной реакции.Биомеханика стопы и функции стопы в различные фазы шага – различны. Если в фазу амортизации основная задача стопы – смягчение удара при контакте с поверхностью, то в период опоры на всю стопу – задача стопы – перераспределение энергии для эффективного выполнения следующей фазы – отталкивания от опоры. Эта фаза ставит перед стопой задачу передачи лежащим выше сегментам силы реакции опоры. Смягчение инерционной нагрузки при ходьбе и беге осуществляется сложным комплексом суставно-связочного аппарата, соединяющего 26 основных костей стопы, в котором выделяют 3 продольных и поперечный свод. Рассмотрим строение только одного из них – среднего продольного свода. Пяточная, таранная и кости плюсны и предплюсны образуют своеобразную арку - рессору, способную уплощаться и расправляться. Нагрузка – вес тела - распределяется равномерно на передний и задний отдел стопы. Передний и задний отделы стопы соединены в единую кинематическую цепь мощным эластичным сухожилием – подошвенным апоневрозом,
Рассмотрим точки приложения реакции опоры к стопе в процессе фазы опоры. Стопа приземляется на наружный отдел пятки. Затем на протяжении фазы приземления центр силы реакции опоры смещается к центру стопы в фазе опоры на всю стопу и на ее передний внутренний отдел в фазу отталкивания. Биомеханический смысл такой траектории перемещения точки приложения силы реакции опоры заключается в том, что при этом в различные фазы опоры создаются вращающие моменты, которые вызывают следующие движения в суставах стопы: супинация стопы – варус пятки и переднего отделов (рисунок 1); пронация стопы – вальгус переднего отдела и пятки, распластывание стопы (рисунок 2); вновь пронация стопы, при которой суставы стопы замыкаются и стопа приобретает жесткость, необходимую для передачи энергии верхним сегментам (рисунок 3). При опоре на всю стопу суставы размыкаются, стопа легко адаптируется к поверхности опоры. В этот период сухожилие стопы запасает энергию в виде энергии упругих связей, которую затем возвращает в период отталкивания.
Пронация стопы – результат внутренней ротации бедра в первую половину опоры ноги. При опоре на пятку колено подгибается, бедро ротируется внутрь, это ускоряет перекат через пятку и перенос веса тела на всю стопу. Затем стопа неизбежно распластывается, и энергия движения переходит в энергию упругих связей стопы.

Рисунок 19. Супинация и пронация стопы.
Таким образом, во время ходьбы мы можем наблюдать два паттерна движений в суставах стопы: супинация и пронация (рис 19). При супинации стопа вращается внутрь за счетподтаранного сустава, пятка находится в положении варуса, свод высокий. Суставы стопы находятся в положении замыкания, что обеспечивает необходимую жесткость стопы при приземлении и отталкивании. При пронации стопы мы видим обратный паттерн: продольный свод опускается, пятка в подтаранном суставе принимает положение вальгуса, суставы размыкаются, стопа легко адаптируется к опоре. Отметим, что продольный свод стопы активно удерживает передняя большеберцовая мышца, дополнительно смягчает инерцию приземления и возвращает жесткость стопы при отталкивании. В момент пронации стопа создает вращательный момент голени – момент наружной ротации.

Рисунок 20. Движение в подтаранном суставе.
Движение – пронация стопы – это вращение в подтаранном суставе (рис 20). Ось этого сустава расположена косо, таким образом, что пронация стопы приводит к ротации голени. Это важно для рассмотрения вопроса – особенности биомеханики коленного сустава при ходьбе.Ось подтаранного сустава расположена косо в направлении спереди назад, изнутри к наружи. Она явно не совпадает с направлением оси голеностопного и коленного суставов. Однако именно такое ее положение (явно несоосное с другими суставами) определяет эффективность ходьбы.
Рисунок 21. Распределение нагрузки в период опоры на стопу при ходьбе.
На рисунке 21 мы видим, что первый пик нагрузки получается из контакта наружного отделапятки с опорой, этот пик находится в первой фазе, в фазе переднего толчка. По мере переката через пятку нагрузка перемещается более на медиальный отдел пятки. Затем, нагрузка перемещается последовательно на 5, 4, 3 и затем вторую плюсневую кость. Это характерно для фазы опоры на всю стопу. И в фазе отталкивания, в фазе опоры на передний отдел, нагрузка перемещается на первую плюсневую кость и большой палец ноги. Подгибание первого пальца и отталкивание от опоры завершает опорную фазу шага. Стопа отрывается от опоры. Как мы уже говорили, результирующая, полученная при сложении всех сил, которые формируются при приземлении, опоре и отталкивании, выглядит в виде двугорбой кривой. Здесь следует отметить, что силы, определяющие реакцию опоры, имеют различное направление. Если при приземлении, силы гравитации и инерции направлены вниз, то при отталкивании сила активного сокращения мышц и инерции тела – вверх. При приземлении ноги мышцы работают в уступающем режиме и гасят энергию удара. Для реализации этого механизма необходима трансформация поступательного движения во вращательное.
Один из таких механизмов мы рассмотрели выше: опора на пятку приводит к вращению относительно подтаранного сустава, пронация стопы приводит к наружной ротации голени и таким образом энергия приземления передается к вышележащим сегментам.
Рисунок 22. Модель обратного маятника.
Однако этого недостаточно для полноценного поглощения переднего толчка. Рассмотрим еще один важный биомеханический механизм - вращение относительно голеностопного сустава. Для этого представим себе идущего человека в виде обратного маятника с центром вращения в голеностопном суставе. Мы видим, как при опоре на пятку возникает вращающим момент, голень под влиянием силы инерции наклоняется вперед, возникает целый каскад вращения в вышележащих суставах ноги, и общий центр масс тела совершает поступательное движение вперед. Схема, представленная на рисунке 22, не совсем точна, на ней (для упрощения) не изображен очень важный момент, очень важный механизм - подгибание в коленном суставе в момент опоры на пятку. Этот и многие другие механизмы трансформации движений при ходьбе, мы возможно рассмотрим в других статьях, посвященных биомеханике ходьбы.
Рисунок 23. Уступающая и преодолевающая работа мышц при ходьбе.
Для того, чтобы получить общеепредставление о работе мышц при ходьбе, которые являются не только источником энергии поступательного движения, но и выполняют важную функцию поглощения и перераспределения энергии в первую фазу опоры посмотрите на рисунок 23. Мышцы нижней конечности работают то в уступающем, то в преодолевающем режиме, то есть то притормаживают, то ускоряют движения в суставах, обеспечивая плавное поступательное движение общего центра массы.
Стопа является первым самым нагружаемым звеном этой сложной трансмиссии. Она осуществляет контакт с опорой, она перераспределяет силу реакции опоры на вышележащие сегменты опорно-двигательного аппарата и выполняет важную рессорную функцию, она обеспечивает устойчивость ноги и сцепление с опорной поверхностью.
Способность стопы противостоять нагрузкам обусловлена не только биомеханически совершенством, но и свойством составляющих ее тканей. Коротки и прочные кости стопы имеют форму точно соответствующую направлению и величине нагрузки.
Известный закон биологии гласит «Функция определяет форму», из этого вытекают прошедшие проверку временем и практикой постулаты: "механические напряжения полностью определяют все детали структуры" и "кость разрастается преимущественно по направлению тяги и перпендикулярно плоскости давления". Структура нагрузки повседневных движений влияет и на рост детского скелета (например, быстрее растет более нагружаемая толчковая, обычно правая, нога), и на структуру скелета у взрослых. Внешняя форма костей может изменяться под влиянием различных видов спорта или профессиональных движений. Они становятся массивнее и толще за счет увеличения костной массы в наиболее нагружаемых участках. Таким образом кости стопы адаптируют свою прочность в соответствии с весом человека и с повседневной двигательной активностью.

Рисунок 24. Подошвенный апоневроз и пяточная шпора.
Аналогичный закон действует и в отношении соединительнотканных структур стопы (связок, сухожилий и фасций). Волокна самой мощной фасции стопы - подошвенного апоневроза ориентированы вдоль самого нагружаемого продольного свода стопы (рис.24).
Если повторяющиеся нагрузки по своей величине или продолжительности превышают возможности тканей стопы, то в них развиваются патологические реакции перегрузки и патологические процессы, такие как воспаление сухожилия, усталостные ы, разрывы сухожилий... Например, отложение солей кальция в области прикрепления подошвенного апоневроза к бугру пяточной кости, которое именуется пяточной шпорой.
Плоскостопие, гиподинамия, избыточные спортивные нагрузки - обычная причина этих заболеваний. Но об этом в другой статье.
Биомеханическая характеристика ходьбы.
Общее название поступательных движений тела – локомоторные движения или локомоции.
Ходьба подобно другим локомоторным движениям осуществляется при участии почти всего двигательного аппарата тела. Благодаря сокращению мышц тело отталкивается от земли, получая толчки, направленные вверх и вперед. Эти толчки сглаживаются действием инерции тела, и все движение приобретает плавный, а не порывистый характер. При отсутствии достаточного сопротивления со стороны поверхности опоры ходьба невозможна.
Полный цикл движений, который характеризует ходьбу, носит название двойного шага. При двойном шаге тело выполняет два так называемых одиночных шага. Одиночный шаг, в свою очередь, состоит из двух простых шагов, заднего и переднего. Если мы представим себе, что через туловище проходит фронтальная плоскость, то движения каждой ноги сзади этой плоскости объединяются под общим названием «задний шаг», а движения спереди этой плоскости – «передний шаг». При каждом двойном шаге тело по пройденному пространству перемещается на три простых шага, хотя по выполненным движениям, производимым правой и левой ногой тело перемещается на три простых шага. При ходьбе тело не теряет соприкосновения с землей: оно опирается на землю то одной, то двумя ногами.
Нога, которая в данный момент опирается о землю, называется опорной ногой, а другая нога называется переносимой или свободной .
Движения ног при ходьбе строго согласованы. Эти движения осуществляются по типу перекрестной координации, что способствует уменьшению вращательных движений туловища вокруг его вертикальной оси. Если человек при ходьбе не производит движений руками, то вращение туловища увеличивается, что заметно при быстрой ходьбе.
Перемещение общего центра тяжести (ОЦТ) при ходьбе происходит волнообразно. Движения каждой ноги можно разбить на 6 фаз:
· фаза приземления и переднего шага опорной ноги;
· фаза вертикали опорной ноги;
· задний шаг опорной ноги;
· задний шаг свободной ноги;
Ходьба - это автоматизированный двигательный акт, осуществляемый в результате крайне сложной координированной деятельности скелетных мышц туловища, нижних конечностей. Ходьба человека складывается из отдельных шагов, представляющих собой простой локомоторный цикл, где выделяются две фазы:
- Переноса.
- Опоры.
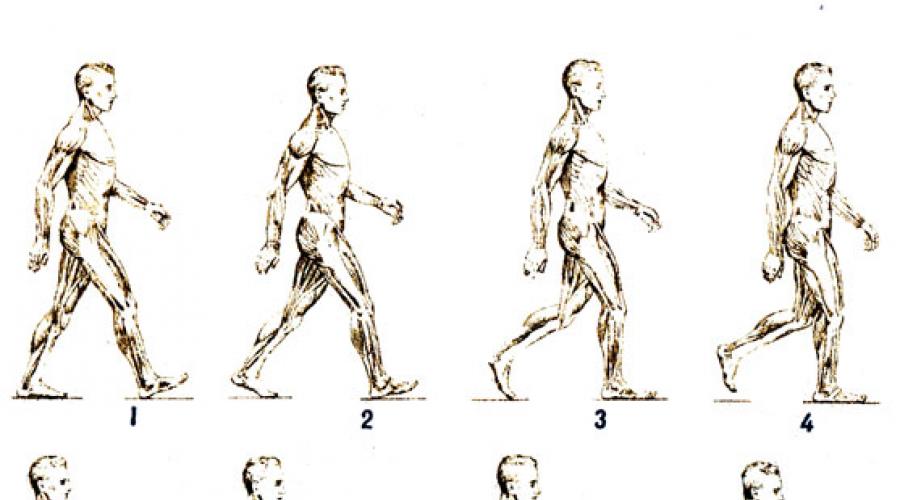
В фазе переноса происходит непосредственно перенос стопы в воздухе на более отдаленную позицию. В фазе опоры стопа контактирует с поверхностью, по которой перемещается человек. В начале переноса нижней конечности вперед (так называемое начало фазы переноса) происходят следующие движения (рис. 1А):
- Сгибание тазобедренного сустава, которое осуществляется при помощи пояснично-подвздошной мышцы.
- Сгибание коленного сустава при согласованном действии двуглавой мышцы бедра и седалищно-бедренных мышц (полуперепончатая, полусухожильная мышцы, и длинная и короткая головки двуглавой мышцы бедра).
- Сгибание голеностопного сустава с задействованием мышц-сгибателей голеностопного и передней большеберцовой и третичной малоберцовой мышц.
- Разгибание пальцев стопы мышцами-разгибателями пальцев стопы (длинный разгибатель пальцев, длинный разгибатель большого пальца стопы, короткий разгибатель пальцев, короткий разгибатель большого пальца стопы).
При начальном контакте стопы с поверхностью наблюдаются такие процессы, как (рис. 1В):
- Окончание процесса сгибания тазобедренного сустава пояснично-подвздошной мышцей.
- Разгибание коленного сустава четырехглавой мышцей бедра.
- Окончание сгибания голеностопного сустава мышцами разгибателями пальцев стопы и сгибателями голеностопного сустава.
В тот момент, когда переносимая нога полностью опирается на поверхность , то наблюдается настойчивое действие четырехглавой мышцы бедра и начало работы большой ягодичной мышцы (рис. 1С).
Рис. 1. Фазы ходьбы человека
Следующая фаза ходьбы заключается в переносе тела вперед . Тут мы наблюдаем такие действия (рис. 2А):
- Разгибание тазобедренного сустава посредством воздействия большой ягодичной мышцы и седалищно-бедренных мышц.
- Антагонизм-синергизм с четырехглавой мышцей бедра.
- Сгибание голеностопного сустава мышцами-сгибателями в синергизме с большой годичной мышцей.
В процессе первого двигательного толчка перед опорой на две ноги наблюдаются такие процессы, как (рис. 2В):
- Продолжающееся разгибание тазобедренного сустава большой ягодичной мышцей и седалищно-бедренными мышцами.
- Продолжающееся разгибание коленного сустава четырехглавой мышцей бедра.
- Разгибание голеностопного сустава двуглавой мышцей бедра и сгибателями пальцев стопы (длинный сгибатель пальцев, длинный и короткий сгибатели большого пальца стопы, короткий сгибатель пальцев.).
В фазе второго двигательного толчка , действующего на несущую ногу человека при полном разгибании, тогда как колеблющаяся конечность собирается наступить на пол наблюдается усиление действия четырехглавой мышцы бедра, большой ягодичной мышцы, седалищно-бедренных мышц, двуглавой мышцы бедра и мышц-сгибателей пальцев стопы (рис. 2С).
В начале перехода с одной несущей конечностью на другую наблюдается процесс укорочения переносимой конечности за счет сокращения седалищно-бедренных мышц и мышц-сгибателей голеностопного сустава, а также сгибание тазобедренного сустава пояснично-подвздошной мышцей (рис. 2D).
В процессе движения конечности спереди усиливается действие пояснично-подвздошной и четырехглавой мышцы бедра с расслаблением седалищно-бедренных мышц. В мести с этим происходит разгибание коленного сустава путем сокращения четырехглавой мышцы беда и поднятие пальцев стопы действием мышц-разгибателей пальцев стопы (рис. 2Е). Далее следует начало нового цикла .

Рис. 2. Фазы ходьбы
Мышцы ног - это не единственные группы мышц, которые участвуют в ходьбе.
Для удержания туловища человека в наклонном положении при переносе ноги сокращаются мышцы задней поверхности туловища такие, как:
1. Трапециевидная мышца.
2. Широчайшая мышца спины.
3. Ромбовидная мышца спины, которая состоит из большой ромбовидной мышцы и малой ромбовидной мышцы.
4. Мышца, выпрямляющая позвоночник.
5. Длиннейшая мышца спины.
С целью предотвращения падения тела назад при заднем шаге происходит напряжение мышц передней поверхности туловища, в большей степени это касается мышц живота:
- Прямая мышца живота.
- Наружная косая мышца живота.
- Внутренняя косая мышца живота.
- Поперечная мышца живота.
- Квадратная мышца поясницы.
Данные мышцы также работаю в случае, если нужно зафиксировать таз и обеспечить тем самым опору для выноса ноги вперед.
Обратите внимание, что в процессе выноса вперед ноги туловище вместе с тазом совершает поворот вокруг вертикальной оси в направлении опорной ноги. Для этого со стороны опорной ноги напрягаются внутренняя косая мышца живота, а с противоположной стороны - наружная, поперечно-остистая и подвздошно-поясничная мышцы.
Мышцы, которые выпрямляют позвоночник, способствуют уменьшению отклонения всего туловища в одну из сторон (мышца, выпрямляющая позвоночник) и длиннейшая мышца спины.
В определенных случаях можно наблюдать сокращение задних мышц шеи. Помимо уже указанных мышц туловища требуется отметить следующие мышцы:
1. Задняя лестничная мышца.
2. Мышца, поднимающая лопатку.
3. Верхняя задняя зубчатая мышца.
4. Ременная мышца головы и ременная мышца шеи.
5. Полуостистая мышца головы.
6. Полуостистая мышца шеи.
Работа мышц верхней конечности при обычной ходьбе незначительна. Во время движения руки вперед сокращаются мышцы-сгибатели в плечевом и отчасти в локте-вом суставах, а во время движения назад - мышцы-разгибатели в этих суставах.
К мышцам сгибателям плеча относятся :
- Передняя часть дельтовидной мышцы.
- Большая грудная мышца.
- Клювовидно-плечевая мышца.
- Двуглавая мышца плеча.
К мышцам-разгибателям плеча относятся :
- Задняя часть дельтовидной мышцы.
- Широчайшая мышца спины.
- Подкостная мышца.
- Малая круглая.
- Большая круглая.
- Длинная головка трехглавой мышцы плеча.
Мышцы-сгибатели плечевого сустава :
- Плечевая мышца.
- Плечелучевая мышца.
- Двуглавая мышца плеча.
- Длинный разгибатель лучезапястного сустава.
- Локтевая мышца.
- Круглый пронатор.
Мышцы-разгибатели локтевого сустава - это трехглавая мышца плеча.
Работа мышц регулирует маятникообразного движения свободной верхней конечности, что возможно в результате одного попеременного сокращения передней и задней частей дельтовидной мышцы.
Когда все перечисленные мышцы не имеют проблем с растяжением и сокращением, то человек ходит и бегает правильно и легко. Таких людей в мире очень мало . В основном, мышцы имеют те или иные дефекты, связанные с каких-то участков мышц. Отек участка мышцы не дает ей растянутся полностью.
Внутри мышечного волокна, который полностью не растягивается, происходит смещение ядер мышечных клеток в одно место и уменьшение количества митохондрий, которые вырабатывают энергию для полного растяжения мышцы. В зависимости от того, какие мышцы отекшие, а какие остались нормальные, проявляются те или иные дефекты: неправильная походка, неровные ноги, походка на носочках, искривление позвоночника.
Например , мышцы спины, рук и ног не двигаются при тетрапарезе (одна из форм ).